Star Coffee Writing about stuff, working in public
SAT Work Log 5
By Michal Jagodzinski - Work Log - April 17th, 2023

Hello and welcome back to Star Coffee! This is going to be another shorter post as I have been a bit busy lately. In this post, I go over some new updates on the orbital dynamics component of the Satellite Analysis Toolkit. Let's get into it.
Improving the Orbital Dynamics System
Firstly, I fixed a small "bug" or typing mistake regarding the OrbitalSystem struct I defined in SAT Work Log 3. There, I defined the struct as:
struct OrbitalSystem{T<:Number, Quant<:Number}
type::String
eqns::Vector{Equation}
system::ODESystem
problem::ODEProblem
u₀::Dict{Num, Quant}
params::Dict{Num, Quant}
tspan::Vector{T}
endI wrote this when I was still learning structs, so it wasn't defined in the clearest way. This time around I rewrote the Quant types as type unions instead:
struct OrbitalSystem{T<:Number}
type::String
orbital_bodies::Dict{String, OrbitalBody}
eqns::Vector{Equation}
system::ODESystem
problem::ODEProblem
u₀::Dict{Num, Union{T, Quantity{T}}}
params::Dict{Num, Union{T, Quantity{T}}}
tspan::Vector{T}
endThis version is written a little clearer I think. For context, I want users to be able to define orbital systems with or without Unitful.jl units, hence the type union. You may notice the addition of the orbital_bodies field. I am implementing a new struct called OrbitalBody, which contains all the information about a specific body in an orbital system. It is defined as:
mutable struct BodyState{T<:Number}
x::Union{T, Quantity{T}}
y::Union{T, Quantity{T}}
z::Union{T, Quantity{T}}
ẋ::Union{T, Quantity{T}}
ẏ::Union{T, Quantity{T}}
ż::Union{T, Quantity{T}}
end
mutable struct OrbitalBody{T<:Number}
name::String
mass::Union{T, Quantity{T}}
state::BodyState{T}
endI created these structs to better organize information about orbital systems and to provide an interface for future interactive orbital dynamics tools. With the new OrbitalSystem definition, the constructor for a two-body system is:
function TwoBodySystem(
u₀::Dict{Num, Quantity{T}},
params::Dict{Num, Quantity{T}},
tspan::Vector{T}
) where {T<:Number}
@assert valtype(u₀) == valtype(params) "Numeric values in u₀ and params must be the same type"
two_body_equations = LoadTwoBodyEquations()
diffeq_two_body_system = structural_simplify(
ODESystem(two_body_equations, t, name=:two_body_system)
)
prob = ODEProblem(
diffeq_two_body_system,
remove_units(u₀),
tspan,
remove_units(params),
jac=true
)
orbital_bodies = Dict(
"Body 1" => OrbitalBody(
"Body 1",
params[m₁],
BodyState(
u₀[x₁],
u₀[y₁],
u₀[z₁],
u₀[ẋ₁],
u₀[ẏ₁],
u₀[ż₁],
)
),
"Body 2" => OrbitalBody(
"Body 2",
params[m₂],
BodyState(
u₀[x₂],
u₀[y₂],
u₀[z₂],
u₀[ẋ₂],
u₀[ẏ₂],
u₀[ż₂],
)
),
)
return OrbitalSystem{T}(
"Two-Body System",
orbital_bodies,
two_body_equations,
diffeq_two_body_system,
prob,
u₀,
params,
tspan
)
endI also implemented constructors for the OrbitalSystem based on the number of inputted OrbitalBody structs, e.g., for a two-body system:
function OrbitalSystem(
body_1::OrbitalBody{T},
body_2::OrbitalBody{T},
tspan::Vector{T};
G_val=6.6743e-11
) where {T<:Number}
orbital_bodies = Dict(
body_1.name => body_1,
body_2.name => body_2
)
two_body_equations = LoadTwoBodyEquations()
diffeq_two_body_system = structural_simplify(
ODESystem(two_body_equations, t, name=:two_body_system)
)
u₀ = Dict(
x₁ => body_1.state.x,
y₁ => body_1.state.y,
z₁ => body_1.state.z,
ẋ₁ => body_1.state.ẋ,
ẏ₁ => body_1.state.ẏ,
ż₁ => body_1.state.ż,
x₂ => body_2.state.x,
y₂ => body_2.state.y,
z₂ => body_2.state.z,
ẋ₂ => body_2.state.ẋ,
ẏ₂ => body_2.state.ẏ,
ż₂ => body_2.state.ż
)
params = Dict(
G => G_val,
m₁ => body_1.mass,
m₂ => body_2.mass
)
if (typeof(body_1.mass) == typeof(body_2.mass)) && typeof(body_1.mass) <: Quantity{T}
if !(typeof(G_val) <: Quantity{T})
params[G] = G_val * 1u"N*m^2/kg^2"
end
prob = ODEProblem(
diffeq_two_body_system,
remove_units(u₀),
tspan,
remove_units(params),
jac=true
)
else
prob = ODEProblem(
diffeq_two_body_system,
u₀,
tspan,
params,
jac=true
)
end
return OrbitalSystem{T}(
"Two-Body System",
orbital_bodies,
two_body_equations,
diffeq_two_body_system,
prob,
u₀,
params,
tspan
)
endSimulations with Improved Orbital Dynamics System
Now a simple plotting example using this new system:
using GLMakie, ModelingToolkit, DifferentialEquations, Unitful
GLMakie.activate!()
include("TwoBody.jl")
body1 = OrbitalBody(
"Test 1",
10e26u"kg",
BodyState(0.0u"m", 0.0u"m", 0.0u"m", 10.0u"km/s", 20.0u"km/s", 30.0u"km/s")
)
body2 = OrbitalBody(
"Test 2",
10e26u"kg",
BodyState(3000.0u"km", 0.0u"m", 0.0u"m", 0.0u"m/s", 40.0u"km/s", 0.0u"m/s")
)
t, x₁, y₁, z₁, ẋ₁, ẏ₁, ż₁, x₂, y₂, z₂, ẋ₂, ẏ₂, ż₂, r, D, G, m₁, m₂ = LoadTwoBodyVariables()
two_body_system = OrbitalSystem(body1, body2, [0.0, 480.0])
two_body_sol = SolveOrbitalSystem(two_body_system, Tsit5())
fig = Figure(resolution=(1500,1500)); display(fig);
ax1 = Axis3(fig[1,1])
times = 0.0:0.1:480.0
lines!(ax1, interp_sol(two_body_sol, [x₁, y₁, z₁], times)..., label="Mass 1")
lines!(ax1, interp_sol(two_body_sol, [x₂, y₂, z₂], times)..., label="Mass 2")
axislegend(ax1)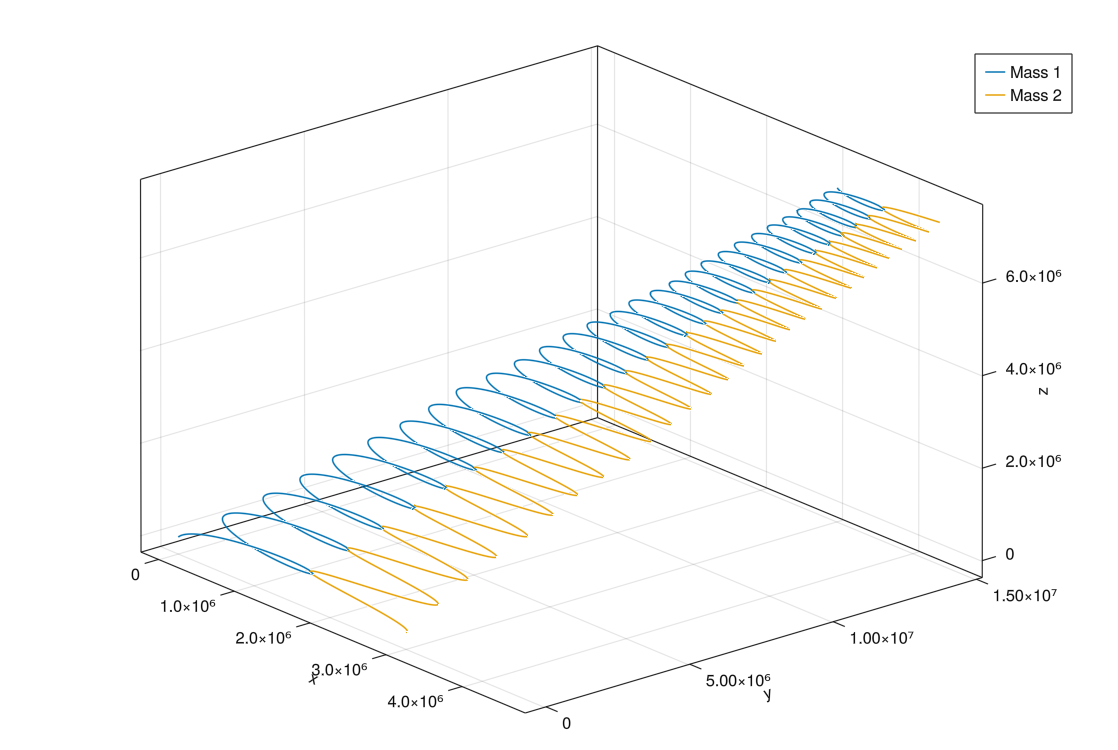
Alternatively, using the previous system:
using GLMakie, ModelingToolkit, DifferentialEquations, Unitful
GLMakie.activate!()
include("TwoBody.jl")
t, x₁, y₁, z₁, ẋ₁, ẏ₁, ż₁, x₂, y₂, z₂, ẋ₂, ẏ₂, ż₂, r, D, G, m₁, m₂ = LoadTwoBodyVariables()
two_body_example_u₀ = Dict(
x₁ => 0.0u"m",
y₁ => 0.0u"m",
z₁ => 0.0u"m",
ẋ₁ => 10.0u"km/s",
ẏ₁ => 20.0u"km/s",
ż₁ => 30.0u"km/s",
x₂ => 3000.0u"km",
y₂ => 0.0u"m",
z₂ => 0.0u"m",
ẋ₂ => 0.0u"m/s",
ẏ₂ => 40.0u"km/s",
ż₂ => 0.0u"m/s"
)
two_body_example_p = Dict(
G => 6.6743e-11u"N*m^2/kg^2",
m₁ => 10e26u"kg",
m₂ => 10e26u"kg"
)
two_body_system = TwoBodySystem(two_body_example_u₀, two_body_example_p, [0.0, 480.0])
two_body_sol = SolveOrbitalSystem(two_body_system, Tsit5())
fig = Figure(resolution=(1500,1500)); display(fig);
ax1 = Axis3(fig[1,1])
times = 0.0:0.1:480.0
lines!(ax1, interp_sol(two_body_sol, [x₁, y₁, z₁], times)..., label="Mass 1")
lines!(ax1, interp_sol(two_body_sol, [x₂, y₂, z₂], times)..., label="Mass 2")
axislegend(ax1)Both methods result in the exact same OrbitalSystem. I think having a choice of methods is a good idea. Using the OrbitalBody method is better for integrating with interactive tools, whereas using the TwoBodySystem constructor is better for users directly running simulations manually.
I needed to include the call to the LoadTwoBodyVariables() as the Symbolics.jl variables could be defined with or without units, and I don't want to assume units for every case. These variables have to be defined as the OrbitalSystem uses ODEs defined by these variables (see SAT Work Log 2 - Orbital Dynamics Work). To work with unitless values, LoadTwoBodyVariablesUnitless() is called instead.
I realize having to define the system variables in the main scope in this way is quite clunky. Unfortunately this is the best way I found to do this at the moment. I am thinking of defining macros to do this automatically, but I don't know enough about macros to implement this just yet.
I also wrote a simple helper function to automatically apply and return the interpolated values of inputted variables to an ODE solution, which I use above:
function interp_sol(
solution::ODESolution,
vars::Vector{Num},
times::Union{StepRangeLen, Vector}
)
sol_interp = solution(times)
return [sol_interp[var] for var in vars]
endWrapping Up
Thanks for reading this short post! I hope to have more exciting work to showcase soon. I want a good foundation defined before building more complex tools, so I believe this type of work is necessary. Until next time.
Website built with Franklin.jl and the Julia programming language.